
Augmented reality
Our goal is to develop vision-based methods which allow significant progress of AR technologies in terms of ease of implementation, usability, reliability and robustness. Matchin interest points, pose computation and visual reconstruction are our two main research topics. Our originality lies in our in-large approach of the AR applications which leads us to consider all the components of an AR system and various means, ranging from autonomy to interactivity, to reach the robustness to space and time scaling required for the applications to be effective.
Urban Augmented reality
|
 |
A contrario methods for robust point image matching
|
|
Enhancing pose estimation with view synthesis
|
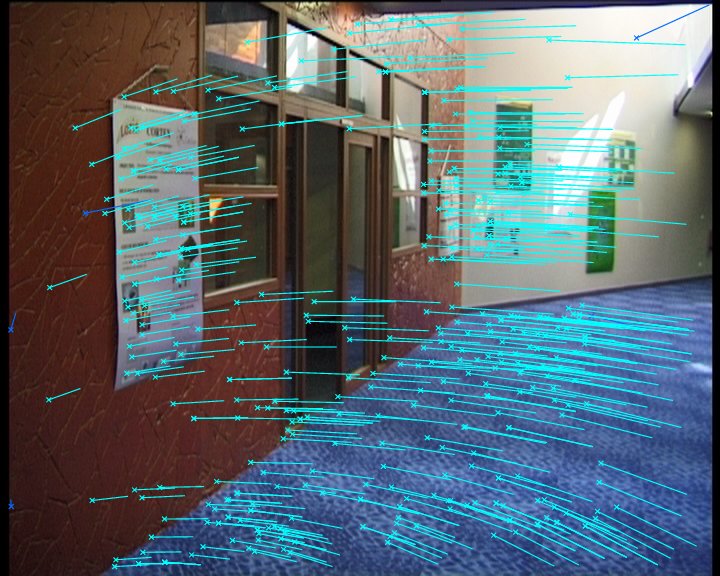
Given a model acquired with Structure from Motion, with each 3D point represented by a cluster of 2D descriptors extracted from images, our goal is to enrich the cluster with descriptors computed from virtual viewpoints poorly represented in the original sequence. Amethod for optimal positionning of the virtuals views has been proposes at BMVC 2016. This work was the object of P. Rolin's PhD thesis.
|
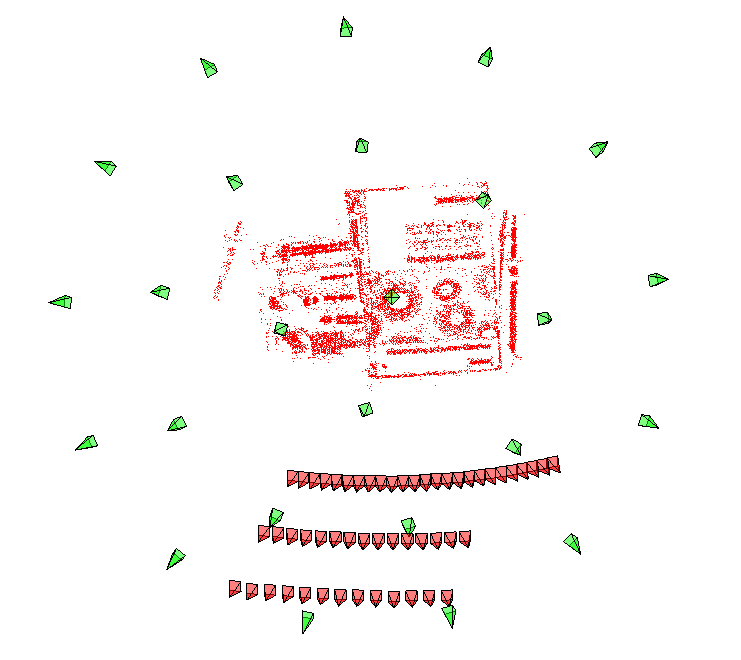 Red: sequence used by SFM, green: virtual viewpoints |
 | 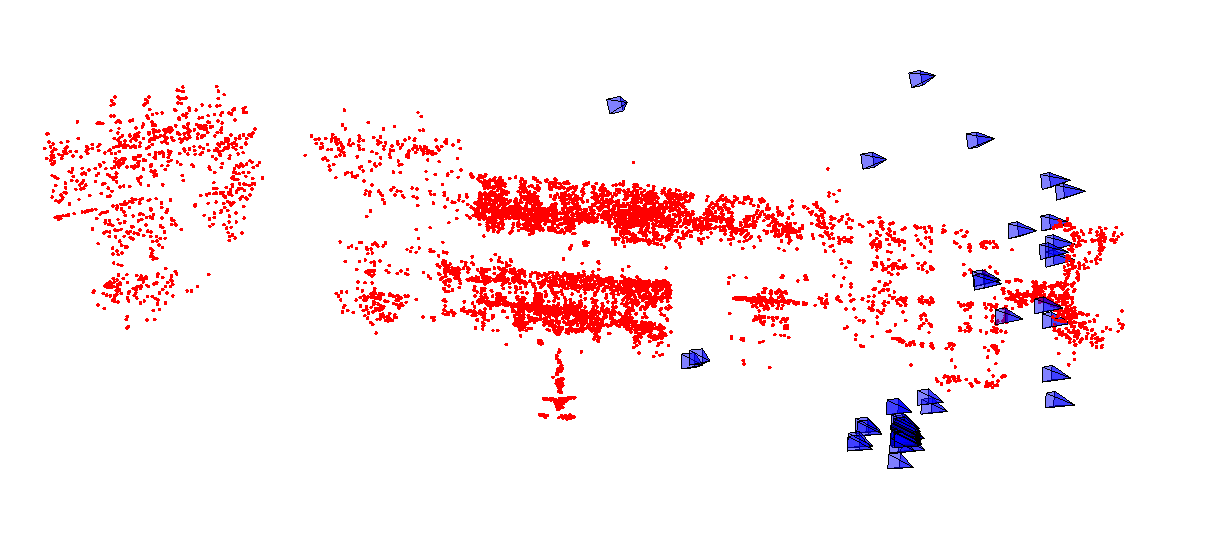 | 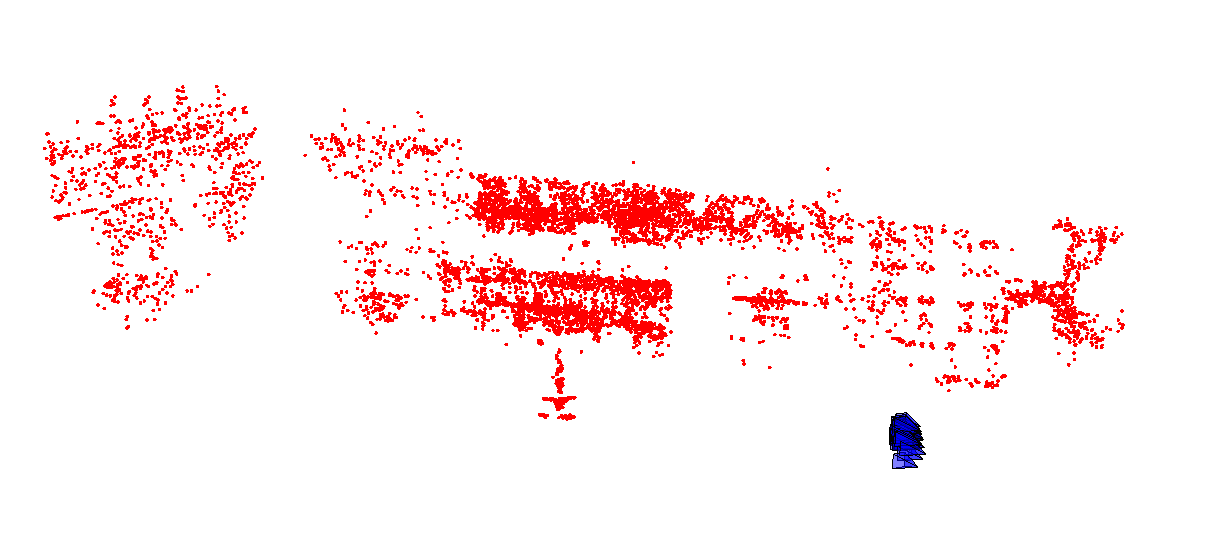 |
| test image | pose without synthesis (100 trials) | pose with view synthesis (100 trials) |
Augmented reality for multi-planar environments
|

|
Interactivity in AR systems
|
For some applications, human can be relied upon to acquire structured scene models. Our motivation is to enable fast capture of textured surface models suited to AR. We are investigating various methods for in-situ sketching using a video camera as an interaction device.
|

|




copyright INRIA / Photos C. Lebedinsky